


策力木格研究室
策力木格研究室のページへようこそ
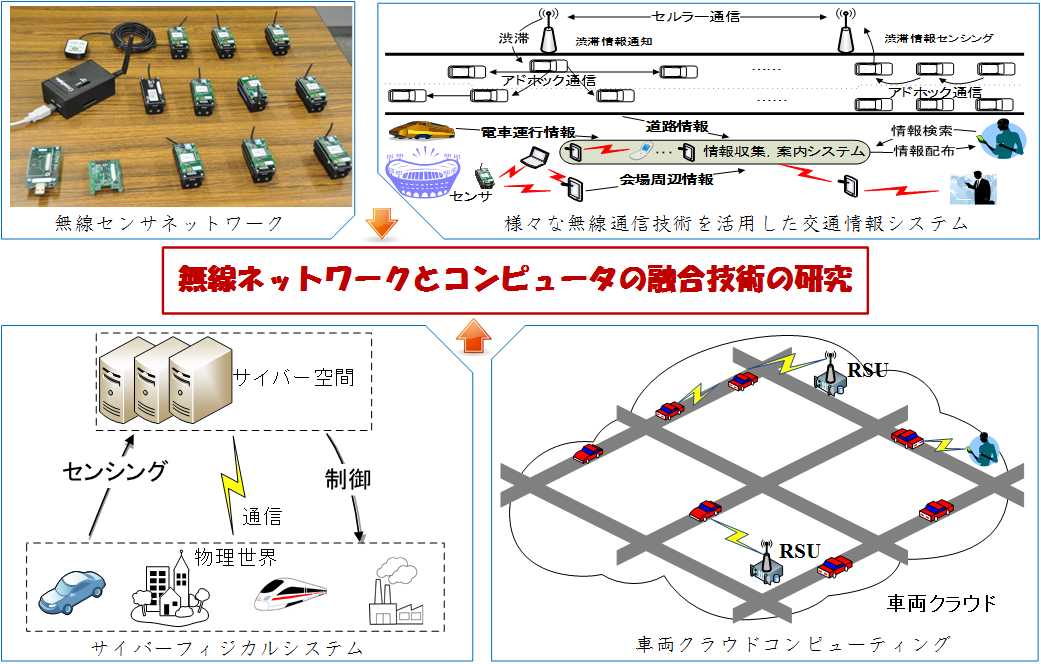
策力木格(チリムゲ)研究室では,無線ネットワークとコンピュータの融合技術に関して幅広く研究している.特に車両ネットワーク,センサネットワーク,クラウドコンピューティング,IoT(Internet of things),ビッグデータ処理,Webサービス,ユビキタスシステム等,スマートな社会を実現するための情報通信技術の研究を行っている.具体的に,下記のテーマに焦点をあてる.
1. 自律分散IoT技術を活用した映像配信システム
IoT(モノのインターネット)端末の増加により、インフラに依存する通信方式(例えば、衛星放送、携帯電話ネットワーク)だけでは情報配信(特に映像)に必要な通信品質を保証することが難しくなる。本研究では、自律分散通信を活用したIoTプロトコルの研究と、それを利用した映像配信システムの研究開発を行っている。

2. CPSにおける路車・車車・歩車協調通信・制御プロトコルの研究
近年,実世界における組み込みシステムなどが構成するセンサネットワークの情報を,サイバー空間の強力なコンピューティング能力と結びつけ,より高度な社会を実現するためのサイバーフィジカルシステム(CPS)が注目を集めている.車両ネットワークはCPSの非常に重要な一部であり,高度交通システムや自動運転などにおける必要な通信を提供する(車車間通信は“MIT Technology Review”にて2015年の“10 breakthrough technologies”の一つとして評価された).しかし,車両ネットワークにおける協調通信に関する研究がまだ不十分であり,効率的な協調通信システムがまだ体系化に至っていないのが現状である.そこで,本研究室では,実世界と情報通信技術の融合ということを目標とし,CPSセンシング技術,車車間・路車間・歩車間通信技術を用いた車両ネットワークにおける交通事故の削減,渋滞の解消,災害時の適切な情報の提供,快適な運転の実現などのための協調通信・制御システムの研究を行っている.
3. 端末の異種性を考慮した自律分散協調通信システムの研究開発
オリンピック等の大規模イベントにおいては,交通混雑を緩和する,または選手・観光客に正確な交通情報を提供するシステムが非常に重要である.既存の交通システム(例えばVICS)は事前に設置したインフラ,集中管理に基づいた案内であるため,正確性,リアルタイム性が乏しい.また負荷分散を考慮せず,すべてのユーザに同じ情報を配布するため,渋滞を加速化する場合がある.そこで,より正確かつ迅速な交通情報案内のための自律分散協調システムフレームワーク並びにそのためのプロトコルの研究を行っている.提案フレームワークの設計では以下3点に焦点を当てる①車車間・路車間・歩車間・M2M(マシン・ツー・マシン)協調通信を利用して,ネットワークで分散的にユーザのルート検索記録を保存し,ユーザ行動を推測することで,ユーザの目的地に合わせた最適なルートを提供しながら,よりよい交通量配分を行う②異種無線通信デバイスを想定したクラウドソーシング技術を利用して,周囲情報を収集し,端末間情報共有により,正確な情報に基づいた案内をする(会場内案内を含む)③ユーザ側でスマートフォンアプリをインストールすることで,電車,バス等あらゆる交通手段を組み合わせたリアルタイム案内情報が取得できるシステムの設計を目的とする(Webサービスなどで情報提供).
4. 車両を対象としたビックデータ収集プロトコルと負荷分散方式の研究
近年,車両に搭載したセンサからの各種情報を収集・分析する車両センサ情報システムが注目を浴びており,ITS,都市交通インフラの改善,車両部品の改善,車載カメラを利用した監視システム,電気自動車(EV)スマートグリッドにおける効率的な充電・放電スケジューリングの実現などに期待されている.このようなシステムに対応する車両の普及に従い,車両センサがビッグデータ発生源になると考えられる.そこで,以下の2項目について研究を行っている①車両アドホックネットワーク(VANET)による短距離アドホック通信とセルラ通信を組み合わせて,車両ビッグデータを効率的に収集・転送するためのプロトコルの研究・開発を行う.またITS,スマートグリッドなどにおける車両ビッグデータの活用について研究する②車両に搭載したCPUなどの計算機資源を有効活用し,車両ビッグデータの処理を負荷分散する手法の研究を行う.データの秘匿性・データの規模などの原因により,すべての車両データをサーバ側で収集するのは現実的ではない場合がある.そのため,一部の計算を車両側で分散的に行い,計算結果をマスターノードに返す手法を提案する.分散処理をするために高速なデータ転送が必要であることを考慮して設計を行う.
5. センサ間自律分散通信を利用したIoTシステム
IoT技術,センサネットワーク技術を用いることで,マルチホップ無線通信を利用して患者の情報をデータサーバに送り,情報管理を一元化することが可能となる.例えば,24時間心電図記録の場合は医者がリアルタイム的に患者の状況を確認することができる.また位置測定方法を利用することにより,患者の動きを完全に把握できる.これを実現するために,様々な環境にて効率よく機能する通信プロトコルの設計が必要となる.本研究では,センサ間自律分散通信を利用したIoTシステムの研究開発を行っている.
6. 次世代ヘテロジニアスネットワークにおけるクラウドコンピューティング
人間と人間,人間とマシン,およびマシンとマシン間の通信によって,無線ネットワークは人々の生活のあらゆる部分に浸透している.スマートフォン,タブレットなどの無線端末に加え,各種観測,監視などの用途のための無線デバイスの利用が指数的に増加しているため,10Gbps以上のピークアクセス速度を有し,兆単位のデバイスとの接続を提供することを次世代の無線ネットワーク(5G)で実現する必要がある.東日本大震災では,普段より60倍の携帯電話トラフィックが殺到したとの報告がある.緊急時や災害時における無線アクセスの需要の急激な増加と資源の不足にも柔軟に対応し,移動性,耐中断性にも優れたサービスを提供する必要がある.これを実現するためには,ヘテロジニアスネットワークを想定したクラウドコンピューティング技術の活用が非常に重要な課題となる.そこで,本研究では,5Gヘテロジニアスネットワークにおけるコンピュータリソースと通信リソースの組み合わせを最適化,知能化(Software-Defined Networkで実現)する問題について研究している.
